Summary:
This post is an overview of an board I'm developing which encapsulates the RFM69 radio module with a MCU to expose a simple UART API which can be tailored for specific applications. This simplifies embedding a radio into existing applications with very little additional expense in terms of hardware or power budget. The API is implemented by a light weight radio OS (currently just 5KiB) which is open source and the bill-of-materials for the board can be as little as $8 / €7.
Background to project:
 |
| WRSC2014 contestant Team FASt from University of Porto. |
The
World Robotic Sailing Championship 2014 was held in Galway Ireland (my home town) in September this year. It was originally anticipated that each contestant would use a RFM69 radio module to relay real time positioning information back to a central hub for recording the race and scoring. It was also hoped that the race organizers could use the same radio network to broadcast race waypoints, starting times, obstacles etc. However given the short time available it became clear that race contestants would not have sufficient time to incorporate this module into their hardware and write the associated supporting firmware.
Based on the experience of WRSC 2014 I believe the best solution for such competitions is to develop a low cost ready made 'black box' which is given (ready made and programmed) to each contestant. The black box would expose a very simple API to the boat's software which should not take long to integrate. Or if it's a case the contestant simply does not have time to make any changes to their software the radio can be mated with a GPS module and it will send real time position, speed and heading back to the race organizers.
This project is the first step in such a system. An entire race system will incorporate other elements such as base station software, real time visualization tools, race protocols etc. This blog post only discusses the radio board.
RFM69 family of modules:
The RFM range of modules are made by
HopeRF and based on the Semtech radio ICs. The RFM69 comes in several varieties. The one I've been using is the higher power version: the RFM69HW [1] which is based on the Semtech SX1231H [2] chip.
Feature highlights:
- Digital SPI interface
- Operates on 433MHz unlicensed ISM band
- Continuous or packet mode (66 byte FIFO)
- Built in AES encryption and CRC-16 engine
- Configurable bit rates up to 300kbps
- Configurable power settings
- Line-of-sight ranges in excess of 1km
- Sleep current < 1µA
- Only $4 in small quantities
The radio board:
This is the general architecture of the board: a MCU acts as the go between the application hardware and software and the RFM69 radio module. The MCU takes care of all the complex register configuration of the RFM69 and takes of low level functions (such as responding to pings, remote configuration commands etc) without ever bothering the application. The application talks to the MCU thru a standard UART interface using a very simple protocol.
In addition to the core API there is also the option to compile in application specific functions (for example I've build in support for a rain tip-bucket and a temperature sensor: more on that later).
Prototype mk1:
Unfortunately these modules have a 2mm pad pitch making them difficult to use directly with standard 2.54mm spacing prototype board or breadboard. So for the first prototype I glued the module onto a prototype board and used thin 30AWG wire to link the module pads to pads on the protoboard.
Reasonably need looking from above...
The problem is on the underside...
Even though it's only a hand full of wires, cutting, stripping and soldering these is very time consuming and error prone (well in excess of three hours per board).
For the first prototype I used a LPC810 ARM Cortex-M0+ MCU as the controller. The ARM Cortex-M range is my MCU of preference these days due to the ease of 32 bit programming, open source and well supported tools and a wide range of vendors (NXP, TI, Freescale etc).
This 8 pin DIP, 4KiB program memory device was adequate for initial tests, but I quickly ran up against the 4KiB program limit. The 8 pin DIP package also had the advantage that I could socket it and try different versions of firmware just by swapping out the device.
With two of these modules I did some range tests. I soldered 17cm wire (quarter wave at 433MHz) to both sides of the board just at the RFM69 antenna output pad. I was able to achieve two way communication of about 1km along the (line-of-sight) length of the Doughiska Road in east Galway city.
Prototype mk2:
For the next prototype I moved to the LPC812: in many ways identical to the LPC810 but with more IO pins and more memory (16KiB program memory, 4KiB SRAM). Rather than use time consuming protoboard I decided it was worth spending some money on a PCB. I designed a two layer board using the free version of
CadSoft Eagle and used
Eurocircuit's standard FR4 pool to fabricate. This job cost €80, but for that I got 20 boards. The turn around time was nominally 10 working days, but I had them in a week.
The board in the photo actually comprises two boards: one for the RFM69 discussed here and another for a similar (better?) module the RFM98 which I'll discuss in another blog post. The two halves are separated with a hacksaw.
One very handy feature of the LPC81x range of MCU is the switch matrix which allows many of the MCU functions to be mapped to an arbitrary pin. This makes PCB layout a lot easier.
After populating with the MCU, module and 3 other components (LED, resistor and decoupling capacitor for MCU) this is what the board looks like. There is the option to use a wire as antenna, or alternatively splash out on a SMA connector (probably the most expensive component on the board!). This photo shows a SMA connector with a 433MHz stub antenna obtained from Farnell [3].
On the left is the UART connector for the radio API, pins for Serial Wire Debug (SWD) for debugging and reprogramming. Left top is the power connector (3.3V nominal, but will work down to 1.8V).
There is also a LED at the very top-left. This is a general purpose indicator that's under control of the MCU. I use this to flash a sequence after boot up tests are complete and flash it each time a packet is sent or received.
In the center there is an option for another connector which will give direct access to the RFM69 SPI port for debugging, or simply using the PCB as a breakout board for the radio module (leaving the MCU pads unpopulated).
The bill of materials is PCB €2; LPC812M101JD20 €1.50; RFM69HW €3 ; passives, pin headers €0.50; SMA connector (optional) €3.50 ; stub antenna (optional) €5. That's a total of €7 without the SMA connector option. Those prices with the exception of the PCB are for single quantities from Element 14's catalog. Significant discounts are usually available when ordering 20+. Also components can often be sourced at a much lower cost from Chinese retailers (eg Alibaba and Deal Extreme). The PCB cost is more complex: many fabricators have a fixed job charge (it was about €50 for Eurocircuits) and they then charge per PCB after that. So if you make a lot of them the price per board goes down quickly. If you make just one it will be very expensive.
The radio OS firmware:
My firmware is written in C and currently uses the
LPCXpresso IDE to build. This uses the GCC compiler under the hood. The main purpose of the firmware is to expose an simple UART API which the host application uses. The API protocol is simple: a single character command/response code followed by parameters separated by spaces followed by a carriage-return to end the command. All parameters are in hexadecimal. Example:
application to radio:
T 44 5232
'T' means transmit a packet. It takes two parameters: the to-address and the packet payload.
radio to application:
p FF 42 7A14051F003D AD
The 'p' response code is transmitted to the application whenever a packet is received. There are four parameters: the to-address (FF hex being the broadcast address), from-address, the packet payload and the RSSI (received signal strength indicator).
Other commands include 'R' and 'W' to read/write RFM69 radio configuration registers. 'M' to switch operating mode from an active awake/listening (20mA current use) to a sleep-polling mode using an average of about 140µA.
Some advanced experimental commands are remote register read/write, allowing a remote radio to be reconfigured. Remote watchdog timer configuration which will reset the radio to default configuration should there be a prolonged loss of communication. Remote command execution (which can be used for remote configuration and to relay packets), remote battery voltage measurement.
Test application:
As mentioned earlier the intended application is for robot sailboat telemetry. But I'm conducting initial tests by using one of these radios with a rain tip-bucket and temperature sensor in my garden. I've got the radio board in an IP66 enclosure with a small PV panel and LiPo battery (and associated charger).
The tip-bucket causes a magnet to fly past a reed-switch each time the bucket tips. I use this in conjunction with one of the spare LPC812 pins and an interrupt channel to count each time this happens. I've also got a DS18B20 temperature sensor on another spare pin.
I run this in low power polling mode. Every 30 seconds the MCU comes out of deep sleep mode, makes a temperature measurement and fires up the transmitter and sends a status packet with the tip bucket counter, current temperature, and battery voltage [4]. It listens for about 100ms for a response packet. If none is received it goes back into deep sleep mode.
If I need to communicate to the out door unit I must wait for a poll packet and then immediately send my command. If multiple commands need to be issued, the first command is to switch the radio into active listen mode, issue all the necessary commands and then put back into low power mode.
So far tests have been successful with the only communications disruptions attributed to either running out of battery charge (it's winter here and the days are short: unless it's a sunny day there is not enough stored charge to keep it going through the night) or a problem with the USB/Serial cable at the receiving end.
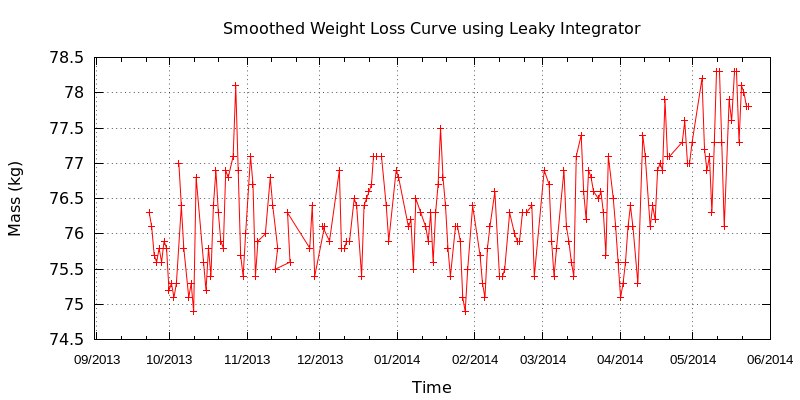
This is 48 hours of some sample data. The disruptions are due to problems with the USB/Serial cable at the receiving end: the radio worked flawlessly. Also note the elevated temperatures are due to the sun falling directly on the IP66 box.
Current and future work:
I'm currently working an a web browser based application/UI to interact with these radios. The application will allow configuration of the local and remote radios, performing experiments with various radio settings. Monitoring network performance etc.
Also I'm planning to make a third prototype. This will be smaller than the current board, perhaps putting the MCU on the underside of the board. I'm also considering moving to the recently announced LPC82x MCUs [ref] which feature more program flash, more SRAM, a full ADC and other new features.
Features for future firmware include mesh networking, encryption, remote program execution and over-the-air firmware upgrades.
Conclusions:
So far I'm very impressed with these radio modules. At only $4 they're a steal. I've verified two way communication at over 1km distance line-of-sight and I've heard reports of success well in excess of 1.5km line-of-sight. With the addition of an LPC812 MCU with my radio OS and simple UART API, embedding this radio into an application is far simpler than building the radio driver directly into the application software. The entire bill of materials is about $7 with the option of a SMA connector which might bring it to $10. My PCB layout is available under the BSD licence on
GitHub [5] and the firmware is also available on
GitHub [6].
Footnotes:
[1] RFM69 Datasheet
http://www.hoperf.cn/upload/rf/RFM69-V1.3.pdf
[2] Semtech SX1231H product information and datasheet
http://www.semtech.com/wireless-rf/rf-transceivers/sx1231h/
[3] Farnell/Element 14 SKU 2305893, €4.86 in single quantities.
[4] One feature I miss in the LPC81x range of MCU is a full ADC. There is however a comparitor which can be used with a voltage ladder to make crude voltage measurements. I use this for battery voltage measurement (Vcc thru voltage ladder on one comparitor input, and the built in 0.9V voltage reference on the other). In my tests it can detect low battery voltage condition, but due to the coarse resolution I get a warning only about a hour before the voltage drops below the cutoff threshold.
[5] https://github.com/jdesbonnet/RFMxx_LPC812
[6] https://github.com/jdesbonnet/RFM69_LPC812_firmware
Updates:
11 Feb 2015: Added link to firmware repository on GitHub.










.png)









{kind=link}